Temporal coding
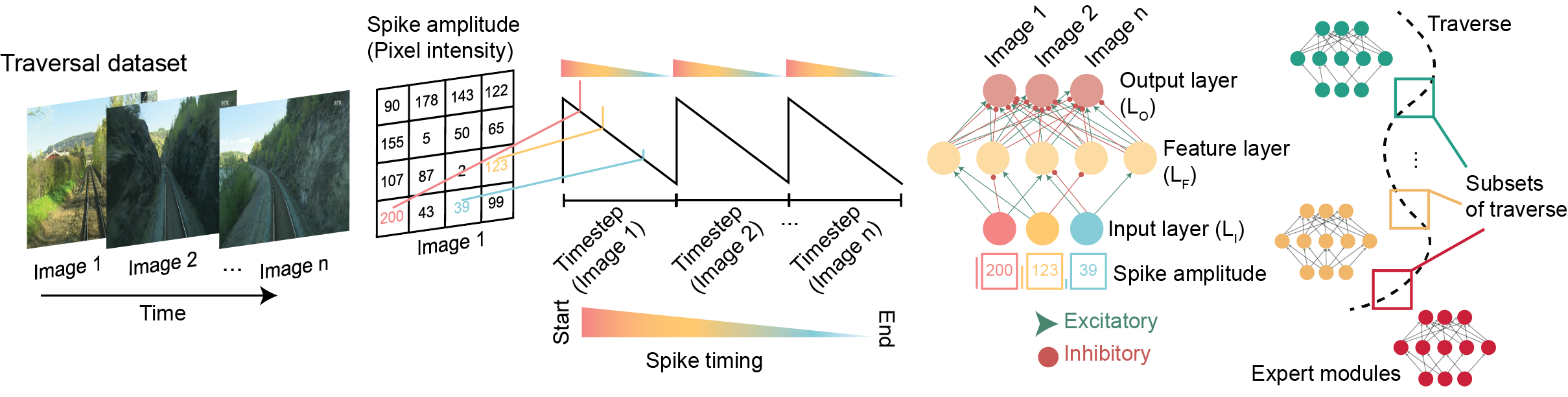
VPRTempo achieves its fast training and inferencing by using a temporal coding scheme for neuron spikes. This increases spike efficiency by over 100% when compared to conventional rate coded systems.
This study introduces VPRTempo, a novel Spiking Neural Network (SNN) designed for Visual Place Recognition (VPR) that offers rapid training and quick query times, making it ideal for use in compute-limited robotic systems.
Unlike traditional SNNs that rely on rate coding, VPRTempo utilizes a temporal coding mechanism where the timing of spikes is determined by pixel intensity, significantly enhancing efficiency. Trained using Spike-Timing Dependent Plasticity and a supervised learning rule, VPRTempo ensures that each neuron is responsive to a unique place.
When tested on benchmark localization datasets, VPRTempo demonstrated accuracy on par with existing SNNs and the NetVLAD algorithm, but with much faster processing speeds, achieving over 50 Hz inference on a CPU. This makes VPRTempo highly suitable for real-time applications in robotics, particularly for online SLAM in environments where resources are limited, such as space or underwater exploration.
VPRTempo achieves its fast training and inferencing by using a temporal coding scheme for neuron spikes. This increases spike efficiency by over 100% when compared to conventional rate coded systems.
Using our temporal coding scheme, we can quickly and efficiently train and query models even for very large dataset sizes (>27k unique places).
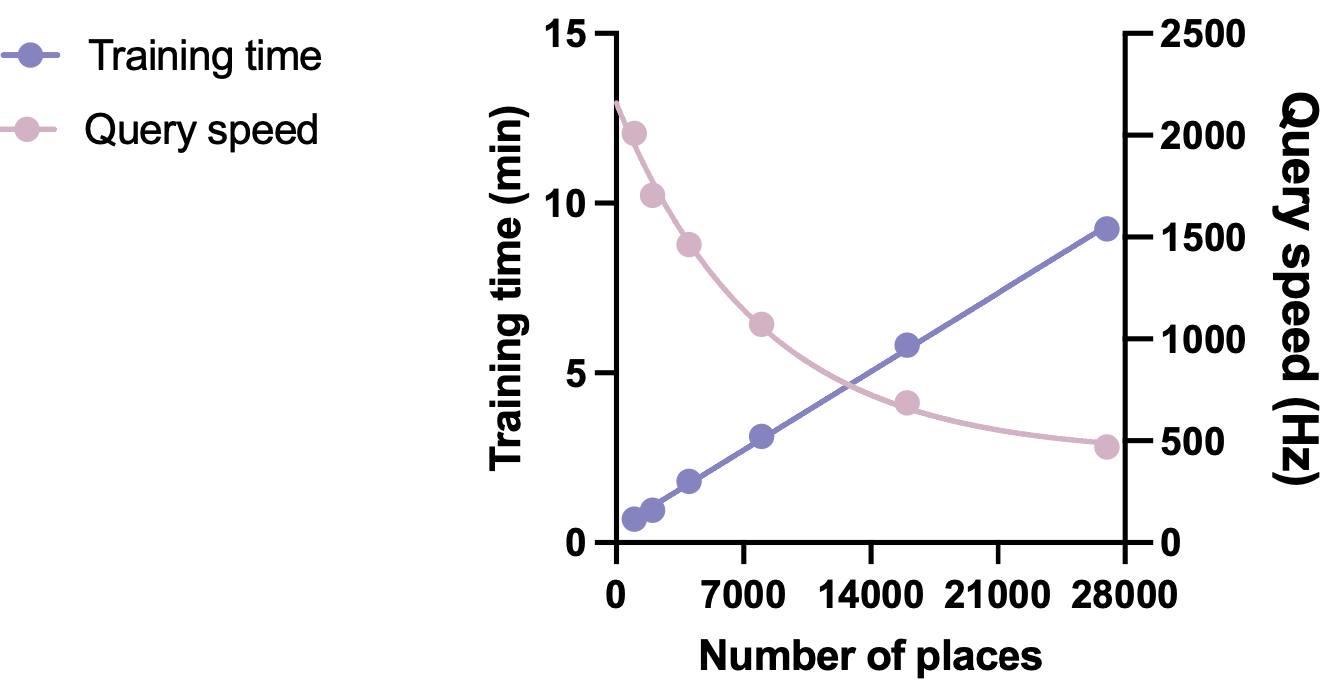
VPRTempo performs comparably for precision when learning conventional VPR datasets (Nordland, Oxford RobotCar). Compared to other VPR methods, however, VPRTempo trains and queries orders of magnitude quicker, indicating its effectiveness for real-time and resource constrained compute scenarios.
@inproceedings{hines2024vprtempo,
title={VPRTempo: A Fast Temporally Encoded Spiking Neural Network for Visual Place Recognition},
author={Adam D. Hines and Peter G. Stratton and Michael Milford and Tobias Fischer},
pages={10200-10207},
year={2024},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)}
}